Can an eVTOL Hover on Just Two Propellers? Bivect Air's Gyroscopic Active-Tilting Portfolio, Assessed
Seven eVTOL concepts, one inventor, just two propellers each. Bivect Air bets gyroscopic control beats a dozen rotors. Does the physics hold?


Bivect Air's Two-Propeller eVTOL Portfolio: Gary Gress's Gyroscopic Active-Tilting Designs Under Scrutiny
1. Summary
1.1 Bottom line.
Bivect Air is the private, single-principal conceptual design practice of Gary Robert Gress, a Canadian engineer (research associate, Department of Mechanical and Manufacturing Engineering, University of Calgary) whose portfolio of seven eVTOL concepts advances a single, technically coherent, and contrarian thesis: that two actively tilted propellers, not the many rotors of the prevailing distributed-multirotor paradigm, are the optimal count for a controllable eVTOL. The central engineering claim, that hover stability and control can be achieved through the gyroscopic precession of two obliquely tilting lift propellers is novel, has a two-decade peer-reviewed and technical-society pedigree behind it, and is supported by flown subscale prototypes. The performance, range, and endurance figures attached to the full-scale concepts, by contrast, are developer-asserted or modeled, not demonstrated, and several of them sit at or beyond the plausible limits of current lithium-ion energy storage.
1.2 Three findings.
- The two-propeller "oblique active tilting" (OAT) concept is a significant control-theoretic contribution (peer-reviewed in the AIAA Journal of Guidance, Control, and Dynamics in 2018 and demonstrated on at least two flying subscale prototypes), but its hover-control authority and, above all, its single-point-of-failure exposure remain unproven at full, crewed scale.
- The portfolio's recurring invocation of "Distributed Electric Propulsion (DEP) redundancy" as a safety feature is in tension with a two-propeller architecture: with only two lift propellers, the loss of one motor or propeller in hover is not a survivable, controllable event in the way DEP redundancy normally implies, and the cited safety rationale does not hold in the conventional sense.
- Several headline performance figures (for example the Odyssey's asserted 362 to 483 km/h cruise on two 60 kW motors, and the Rogue's 335 km/h with a 48 km maximum-power range) are optimistic against battery energy-density limits and should be treated as aspirational targets pending full-scale validation.
1.3 Strategic read.
Bivect Air's strongest and most credible expression is the autonomous emergency-response variant, the Ariel, entered as Team Bivect Air in the GoAERO Prize. The simplicity, parts-commonality, and subscale validation of the two-motor architecture make it unusually well suited to open-hardware and appropriate-technology replication and to the uncrewed, lower-stakes regulatory niche, even as the same simplicity constrains the crewed, certified-aviation pathway.
The Bivect Air eVTOL Portfolio: A Technical, Strategic, and Forward-Looking Assessment of Gary Robert Gress's Two-Propeller Design Practice
1. Summary
- 1.1 Bottom line
- 1.2 Three findings
- 1.3 Strategic read
2. Contextual and Scientific Background
- 2.1 The principal and the practice
- 2.2 The two citable primary sources
- 2.3 Oblique active tilting in brief
3. Key Players and Stakeholders
- 3.1 Bivect Air: private, single principal
- 3.2 The Vertical Flight Society
- 3.3 The GoAERO Prize ecosystem
- 3.4 Lineage cited by the designer
- 3.5 Benchmark developers
4. Technical and Operational Considerations
- 4.1 The two-propeller thesis assessed
- 4.2 Against rotorcraft control theory
- 4.3 Contrast with prevailing paradigms
- 4.4 The redundancy tension
- 4.5 Mission segmentation
5. Economic and Market Dynamics
- 5.1 Energy and performance plausibility
- 5.2 Demonstrated versus modeled
- 5.3 Market context for personal eVTOLs
- 5.4 Prize competitions as a capital substitute
6. Regulatory Landscape
- 6.1 Powered-lift: crewed
- 6.2 Ultralight: Part 103
- 6.3 Autonomy and BVLOS
7. Geopolitical and Strategic Dimensions
8. Structured Risk Matrix
- 8.1 Two-rotor single-point-of-failure exposure in hover
- 8.2 Unproven full-scale hover stability and control authority of OAT
- 8.3 Range and endurance shortfall bounded by battery energy density
- 8.4 Certification-pathway risk across powered-lift, ultralight, and autonomy regimes
- 8.5 Single-principal continuity and capitalization risk
- 8.6 Market-adoption risk for personal eVTOLs
9. Strategic Recommendations
- 9.1 For Bivect Air, toward a credible GoAERO Stage 3 entry
- 9.2 For eVTOL and autonomous-flight engineers
- 9.3 For the open-source and appropriate-technology engineering community
- 9.4 For advanced-air-mobility investors and strategists
10. Caveats
References
2. Contextual and Scientific Background
2.1 The principal and the practice.
Bivect Air is a single-principal design practice; it is not a venture-funded developer or an OEM, and it should not be confused with the certificated-aircraft manufacturers against which it is benchmarked here. Gress has published on dual-fan VTOL control since the early 2000s, including "Using Dual Propellers as Gyroscopes for Tilt-Prop Hover Control" (AIAA Biennial International Powered Lift Conference, AIAA Paper 2002-5968, 2002) and "A Dual-Fan VTOL Aircraft Using Opposed Lateral Tilting for Pitch Control" (American Helicopter Society 59th Annual Forum, 2003) [1]. The portfolio's intellectual through-line is therefore not a recent pivot but a sustained, two-decade research program.
2.2 The two citable primary sources.
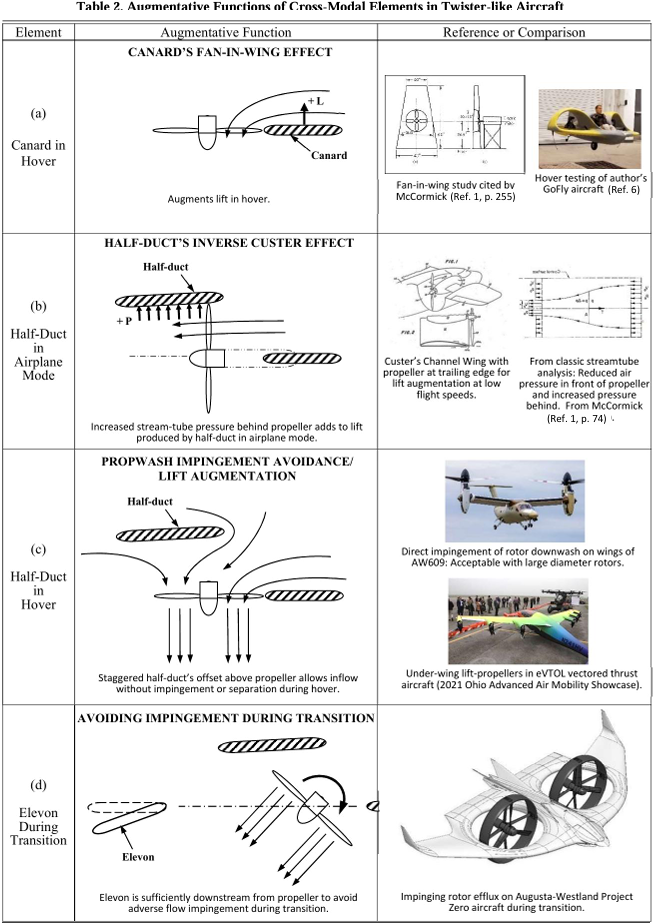
Two primary sources anchor the developer-stated record. The first is the set of eVTOL.news concept-design entries for the seven aircraft, hosted in the World eVTOL Aircraft Directory administered by the Vertical Flight Society (VFS), which lists "Bivect Air Odyssey, Twister, Rogue, Nymbus, Air Rider, Tandem-X, and Ariel," all as concept designs [2]. The second is Gress's Forum 80 paper, "Transitioning eVTOL Aircraft with Augmentative Cross-Modal Elements," presented in the Advanced Vertical Flight technical session of the VFS 80th Annual Forum & Technology Display, held May 7 to 9, 2024, at the Palais des Congrès de Montréal, Québec, Canada, and published by the Vertical Flight Society, Fairfax, Virginia [3]. The paper's abstract describes "lift-fan oblique active tilting (OAT)" generating "large and immediate gyroscopic controlling moments," and states it is "modeled using supporting data from our two flying prototypes" [3].
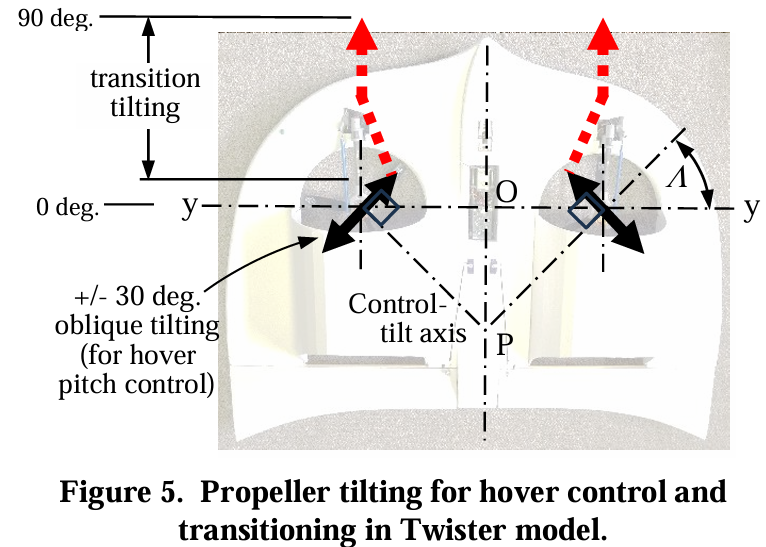
2.3 Oblique active tilting in brief.
A conventional helicopter controls pitch and roll through cyclic blade pitch via a swashplate; a multirotor controls attitude by differentially modulating the thrust of three or more spatially separated rotors. Gress's OAT does neither. It exploits the fact that a spinning propeller has substantial angular momentum and behaves as a gyroscope: tilting the propeller pods along oblique (non-longitudinal) axes produces gyroscopic precession moments that control and stabilize the aircraft. Gress's peer-reviewed analysis argues these moments are "an order of magnitude" more effective than conventional thrust vectoring [1][4]. This is the scientific core of the entire portfolio.
Active tilting is shown to not only enable the use of just two propellers in hovering eVTOL aircraft, but to impart inertial control moments seen previously only in spacecraft. -Gary R. Gress, Bivect Air Designer
3. Key Players and Stakeholders
3.1 Bivect Air (private, single principal). Gary Robert Gress is designer, analyst, builder, and competition entrant. This concentration is both the practice's distinctive strength (coherence, low overhead, rapid iteration) and its principal institutional risk (continuity, capitalization, certification capacity).
3.2 The Vertical Flight Society. VFS functions as the de facto curator and publisher of the primary record, administering the World eVTOL Aircraft Directory and publishing the Forum proceedings [2][3]. It is a neutral technical-society stakeholder rather than a commercial backer.
3.3 The GoAERO Prize ecosystem. The most consequential external stakeholder set is the GoAERO Prize, the three-year (2024 to 2027) global competition to build an uncrewed, autonomy-enabled Emergency Response Flyer, structured as a USD 2.5-million-plus competition [5][6]. Its organizer is GoAERO (founder and CEO Gwen Lighter); GoAERO lists its strategic partners as "Boeing, NASA, RTX, Honeywell, Iridium Communications, and more than 40 international aviation, aerospace, and emergency response organizations," so Boeing is one of several partners rather than the sole title sponsor [6][7]. Honeywell trades publicly (Nasdaq: HON) [7]. Gress competes as Team Bivect Air with the Ariel [8]. As of mid-2026, GoAERO has announced eight Stage 2 winners advancing toward a 2027 Final Fly-Off at Moffett Federal Airfield at NASA's Ames Research Center, where teams compete for USD 1.65 million in prizes across the Adversity, Maneuverability, and Productivity missions: a USD 1,000,000 Top Prize, USD 150,000 for the best performer in each mission, a USD 100,000 Autonomy Prize, and the USD 100,000 RTX Disruptor Prize [5][6].
3.4 Lineage cited by the designer. Gress situates his work within the lineage of the AgustaWestland (now Leonardo) tiltrotor tradition, specifically the AW609 civil tiltrotor and the all-electric AgustaWestland Project Zero technology demonstrator [9][10]. These are reference points for the two-rotor, tilting-thrust configuration rather than collaborators. Leonardo S.p.A. trades publicly (BIT: LDO) [9]. Project Zero, unveiled publicly in 2013 after first flying in 2011, is directly relevant: it was the world's first all-electric tiltrotor, built around "two integrated rotors which can be tilted through more than 90 degrees," tested with both shrouded and unshrouded rotors, and constrained in its original configuration to roughly ten minutes of flight time, a vivid illustration of the battery-energy ceiling that still bounds the field [10].
3.5 Benchmark developers. The prevailing distributed-multirotor and lift-plus-cruise developers, including Joby Aviation (NYSE: JOBY), Archer Aviation (NYSE: ACHR), and the now-insolvent Lilium and Volocopter, plus single-seat and emergency-response peers Jump Aero (private) and Pivotal (private), provide the comparative frame [11][12][13][14].
4. Technical and Operational Considerations
4.1 The two-propeller thesis assessed. Gress's proposition is that each added propeller adds weight, drag, and complexity, and that two propellers suffice if their gyroscopic, momentum-wheel, and drag-torque moments are harnessed for control. The control-theoretic foundation is genuine and peer-reviewed: in "Natural Pitch Stabilization of Bicopters in Hover Using Lift-Propeller Gyroscopics" (Journal of Guidance, Control, and Dynamics, Vol. 41, No. 2, 2018, pp. 476 to 487), Gress shows analytically that a hovering bicopter whose dual, non-cyclic, laterally displaced propellers precess freely as gyroscopes can be stabilized in pitch using viscous dampers, that centering springs are also required in practice, that springs destabilize pitch attitude while maintaining pitch-rate stability, and that "full stability can be restored with the addition of a pilot, here represented as a simple integral controller" [4]. This is an honest, bounded result: the airframe is not unconditionally self-stable; it is stabilizable with damping, springs, and closed-loop (pilot or electronic) augmentation.
4.2 Against rotorcraft control theory. The OAT concept is legitimate physics. Gyroscopic precession of a high-angular-momentum rotor is the same principle exploited by control moment gyroscopes (CMGs) in spacecraft attitude control, an analogy Gress himself draws and which the GoAERO profile of the Ariel makes explicit ("the same operating principles as control moment gyroscopes in orbital satellites") [8]. The critical engineering questions are not whether the moments exist but whether they provide sufficient control authority across the full hover envelope, whether the tilting actuators can avoid control-moment saturation under gust and maneuver loads, and whether disturbance rejection is adequate at full, crewed scale. The peer-reviewed work demonstrates these properties at subscale and in theory; none of the available literature demonstrates them for a crewed, full-scale vehicle. The independent academic uptake of Gress's concept (for example in Journal of Intelligent & Robotic Systems and subsequent OAT-bicopter optimization studies) confirms the concept is taken seriously in the control community but remains at small-UAV scale [1][4].
4.3 Contrast with prevailing paradigms. The dominant eVTOL paradigms diverge sharply from Gress. Distributed Electric Propulsion (DEP), as developed in NASA's X-57 Maxwell program and reviewed in NASA technical literature, deliberately multiplies propulsors (the X-57 used 12 high-lift motors plus two wingtip cruise motors) precisely so that "structural damage to the airframe or the loss of traditional control surfaces are less detrimental to aircraft survivability, as propulsors can be used to generate forces and moments about all six degrees of freedom" [15][16]. Joby's tilt-rotor S4 (six tilting rotors) and Archer's lift-plus-cruise Midnight (twelve rotors) embody this logic [11]. Gress's two-rotor architecture is the antithesis: it trades the inherent fault tolerance of many rotors for the mass and drag savings of two, and substitutes gyroscopic control for both swashplate cyclic and multirotor differential thrust. Notably, the AW609 reference point shares the two-rotor topology but achieves one-engine-inoperative survivability through cross-shafting that mechanically couples its two proprotors, a heavy mechanical solution unavailable to a transmissionless all-electric bicopter [9].
4.4 The redundancy tension. This is the portfolio's sharpest internal contradiction. The eVTOL.news concept entries, following the directory's standard template, cite "Distributed Electric Propulsion (DEP), provides safety through redundancy" as a feature, the identical language applied to genuinely distributed designs such as the eight-motor Jump Aero JA1 Pulse [13]. However, a two-propeller aircraft is not a distributed-propulsion aircraft. With only two lift propellers, the loss of one motor or propeller in hover produces a large, immediate asymmetry of thrust and of gyroscopic moment that a two-rotor airframe cannot trim out: there is no third actuator to redistribute lift, and the surviving rotor cannot recenter the vehicle's attitude. The plain assessment is that one-motor-out controllability in hover is not plausible for this configuration, and the DEP redundancy rationale, as stated, does not hold. The credible mitigations are different in kind: a ballistic (whole-airframe) recovery parachute, as used by Pivotal's single-seat eVTOL and proposed by Jump Aero [13][14]; flight-envelope limits that keep the vehicle within parachute-deployment altitude and speed; and, for shrouded-propeller variants, the open question of autorotation. Autorotation feasibility is itself constrained: the rotorcraft literature holds that autorotation requires disk loading below roughly 10 lb/ft² and adjustable collective, conditions most high-disk-loading eVTOLs cannot meet [17]. A two-propeller eVTOL optimized for high cruise speed will tend toward high disk loading and is therefore unlikely to autorotate; the ballistic parachute, not autorotation, is the realistic last-resort safety system.
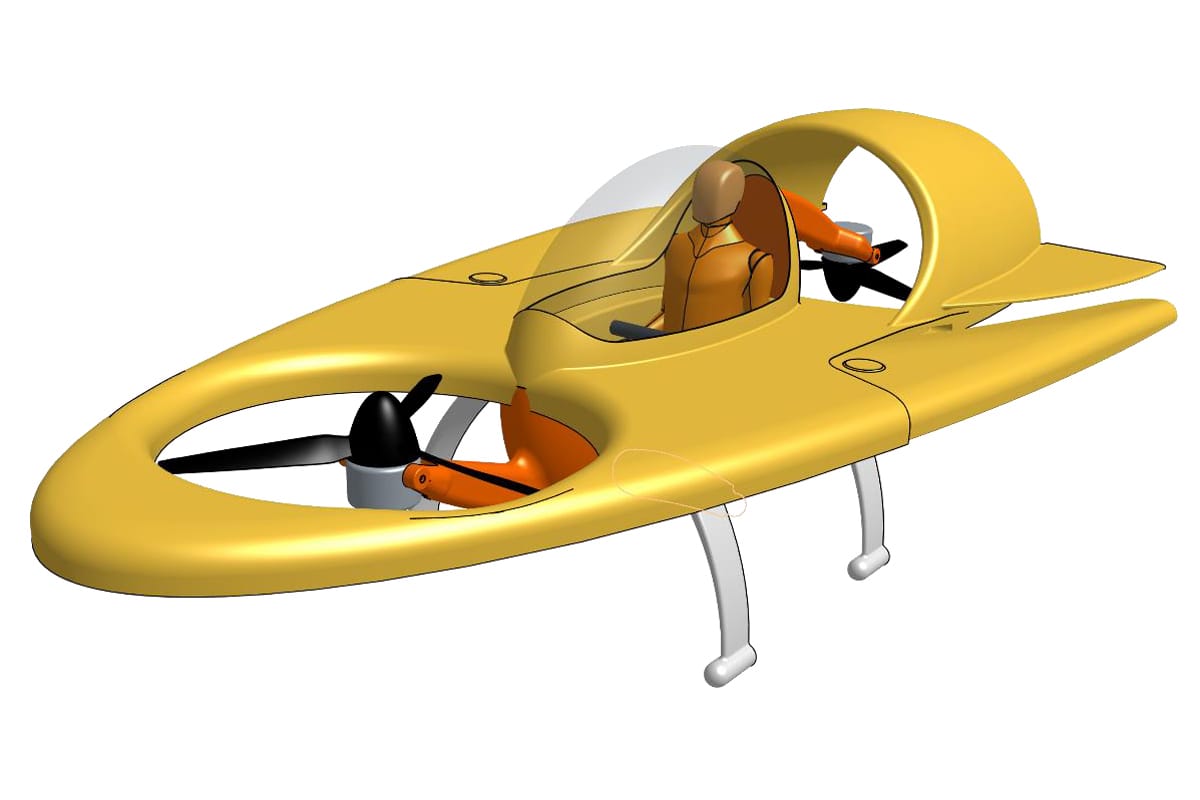
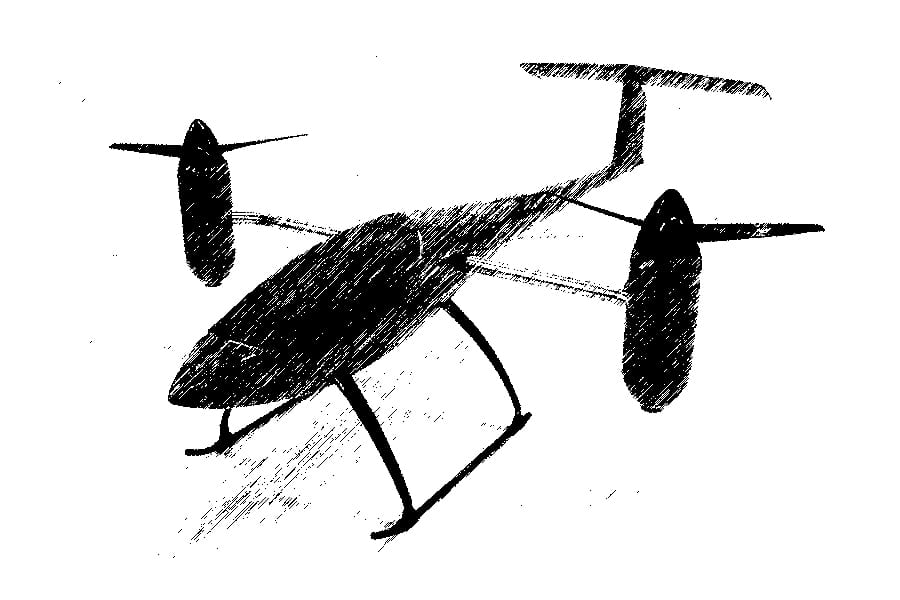
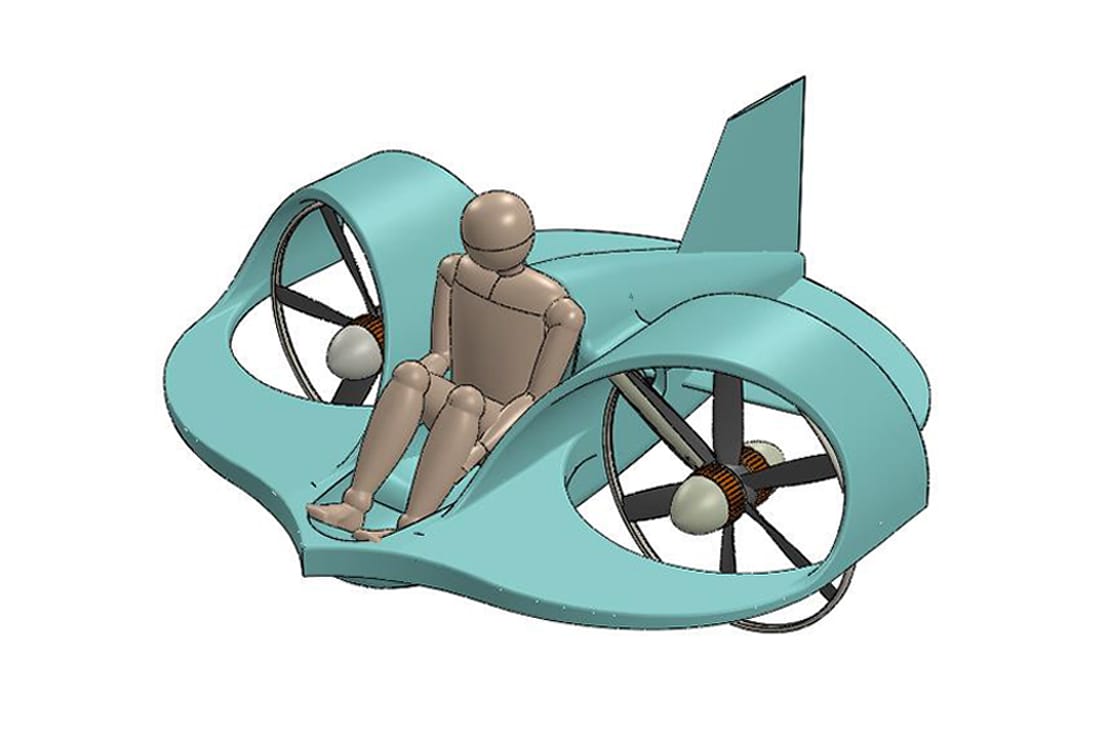
4.5 Mission segmentation. The portfolio maps cleanly onto two mission segments. The recreational and personal-flight segment comprises the Air Rider, Rogue, Twister, Odyssey, and Nymbus; these are single-occupant personal aircraft whose natural regulatory home, if kept within the weight and speed limits, is the ultralight category (Section 6). The autonomous emergency-response segment comprises the Tandem-X and the Ariel; the Ariel is the GoAERO entry, a roughly 6-foot-wide, 16-foot-long tandem-propeller flyer in which "the patient platform fits between the two propellers," designed to fit in a small trailer, deploy without assembly, remain level in horizontal flight, and take off and land from steeply inclined surfaces [8]. The tandem-propeller layout, with one propeller fore and one aft of a central payload, is a genuinely differentiated answer to the emergency-response problem: it keeps the payload (and patient) clear of the rotor disks and accessible to ground personnel, an advantage helicopters and most multirotors lack. The limitation is payload and range: a two-propeller flyer sized for trailer transport will have modest lift margin and endurance, and the autonomous-rescue mission's value depends on autonomy and beyond-visual-line-of-sight (BVLOS) operation that is still maturing (Sections 6 and 7). The Ariel competes in a field that includes purpose-built rescue designs such as the eight-rotor Jump Aero JA1 Pulse, which is also a single-occupant emergency flyer but takes the opposite, fully distributed-propulsion route [13].

5. Economic and Market Dynamics
5.1 Energy and performance plausibility. The headline figures warrant quantitative scrutiny against current battery limits. Aviation-grade lithium-ion packs deliver roughly 150 to 250 Wh/kg at pack level; NASA's eVTOL literature placed aviation-grade pack density at 180 to 200 Wh/kg, and current eVTOL packs are commonly cited at 250 Wh/kg, with cell-level figures up to 300 Wh/kg and experimental silicon-anode or lithium-metal cells higher still but not yet representative of certifiable, cycle-durable packs [18][19]. Two 60 kW motors imply a maximum electrical draw on the order of 120 kW. The Odyssey's asserted 362 to 483 km/h cruise with a 45 to 60 minute endurance is difficult to reconcile with these bounds: sustaining high cruise speed for 45 to 60 minutes at even a fraction of 120 kW implies a battery energy budget (tens of kWh, hence a substantial battery mass fraction) that strains a personal-scale airframe, and the upper speed of 483 km/h exceeds the cruise speed of every certified or near-certified eVTOL. For calibration, Joby Aviation recorded "a true airspeed of 205 mph (330 km/h)" on January 21, 2022, "what we believe to be the fastest flight of an eVTOL aircraft to date," and flew 154.6 mi (249 km) in July 2021; the Odyssey's asserted top speed approaches the 280-knot (520 km/h) target of Leonardo's turbine-class Next Generation Civil Tiltrotor rather than anything in the battery-electric class [11][20]. Similarly, the Rogue's 335 km/h maximum-power figure paired with a 48 km maximum-power range and a 7.7 minute hover endurance is internally consistent only in the sense that high power drains the pack quickly; it confirms that the high-speed and high-endurance claims cannot be realized simultaneously, and that the useful mission radius at speed is short. The honest reading: these figures are best understood as discrete operating-point maxima, not a coherent mission profile, and the cruise and endurance numbers are modeled or asserted, not measured. They could approach plausibility only with pack-level specific energy materially above today's aviation-grade norm, low structural mass fraction, and disk loading and cruise efficiency at the favorable end of the design space.
5.2 Demonstrated versus modeled. What has actually been shown is subscale: Gress's papers reference two flying prototypes (the "MicroVader" and "eVader" class radio-controlled OAT models, and a "Nymbus" OAT model) and the GoAERO profile describes work on a flown subscale prototype of the Ariel [3][4][8]. The full-scale cruise, range, and endurance figures are modeled or asserted. Subscale-to-full-scale scaling is not a free pass: Reynolds-number effects degrade airfoil and propeller efficiency as size drops, so subscale efficiency does not transfer upward cleanly; disk loading rises with scale for a fixed configuration, worsening hover power and autorotation prospects; structural mass fraction tends to grow with scale; and battery specific energy is scale-invariant, so a heavier full-scale vehicle gains no energy-density relief. Subscale flight validates the control concept; it does not validate the performance envelope.
5.3 Market context for personal eVTOLs. The personal and recreational eVTOL market remains pre-commercial and capital-fragile. The 2024 to 2025 insolvencies of Lilium and Volocopter are the cautionary baseline: Lilium raised approximately €1.5 billion (about USD 1.6 billion) and peaked at a USD 3.3 billion valuation, yet filed for insolvency twice (October 2024, and again on February 21, 2025 after a roughly €200 million Mobile Uplift Corporation rescue collapsed), while Volocopter filed for insolvency in December 2024; both reached full-scale hardware yet failed on capital and certification timelines [12]. The one demonstrated commercial path in the personal segment is Pivotal's single-seat, Part 103 ultralight eVTOL, the Helix, priced at USD 190,000 (base, before taxes, delivery, or other fees), with "more than a 20-mile range with a 20-percent reserve," an 8.0 kWh battery, and a 55-knot cruise speed; it succeeded precisely by staying within the unlicensed ultralight envelope rather than pursuing type certification [14]. For Bivect Air's personal-flight concepts, this is the instructive comparator: the addressable near-term market is the ultralight recreational niche, not urban air mobility, and the realistic energy budget (single-digit kWh) and speed (tens of knots) are an order of magnitude below the portfolio's headline figures.
5.4 Prize competitions as a capital substitute. For a single-principal practice, incentive prizes are a rational, non-dilutive development pathway. The GoAERO Prize (USD 2.5 million-plus, plus in-kind software and mentorship from sponsors including NASA, Boeing, RTX, Honeywell, and Iridium) is the operative example [6][7]. The cautionary precedent is GoFly (launched September 26, 2017; final fly-off February 2020), the Boeing-sponsored, roughly USD 2 million personal-flight competition that drew 854 teams comprising more than 3,800 innovators from 103 countries; its final fly-off was held at Moffett Federal Airfield in February 2020, the USD 100,000 Pratt & Whitney Disruptor Award went to teTra Aviation of Japan, and the USD 1 million grand prize was never awarded because no entrant met the full flight requirement [21][25]. The lesson for Bivect Air is sobering: prize ecosystems fund and validate ideas, but the headline grand prize may go unclaimed when full-envelope flight proves harder than designs imply.

Nymbus, Air Twister, Air Raider - Photos by Bivect Air
6. Regulatory Landscape
6.1 Powered-lift (crewed). The crewed eVTOL regulatory picture in the United States was substantially clarified by the FAA's final rule "Integration of Powered-Lift: Pilot Certification and Operations" (RIN 2120-AL72, 89 Fed. Reg. 92296, November 21, 2024), which created Part 194 / SFAR No. 120, a ten-year framework for powered-lift pilot certification and operations [22]. Crucially, the rule did not include pilot qualification requirements or operational rules related to remotely piloted operations or autonomous flight, and assumes at least one pilot at the controls [22]. Any crewed Bivect Air personal eVTOL exceeding ultralight limits would fall into this powered-lift regime, a demanding certification path for a single-principal practice. The decades-long, still-incomplete certification of the two-rotor AW609 illustrates how unforgiving this path is even for a well-capitalized OEM [9].
6.2 Ultralight (Part 103). The more realistic path for the personal-flight concepts is the FAA Part 103 ultralight category, which requires empty weight below 254 lb (115 kg) for powered vehicles, fuel capacity not exceeding 5 U.S. gallons (a constraint that does not bind battery-electric designs), maximum level-flight speed not exceeding 55 knots (about 102 km/h) calibrated airspeed, a power-off stall speed not exceeding 24 knots, single occupant, and recreational or sport use only; it requires no airworthiness certificate, registration, or pilot license [23]. Critically, the rule's 55-knot speed ceiling is flatly incompatible with the portfolio's headline cruise speeds (335 to 483 km/h): a Part 103-compliant Bivect Air personal eVTOL would have to be a fundamentally slower, lighter aircraft than the marketing figures suggest, much like the 55-knot Pivotal Helix [14][23]. The 254-lb weight limit explicitly excludes "safety devices intended for deployment in a potentially catastrophic situation," so a ballistic parachute does not count against the limit, a meaningful allowance given the redundancy analysis in Section 4.4 [23].
6.3 Autonomy and BVLOS. The emergency-response variants depend on uncrewed, autonomous, and BVLOS operation. In the United States, BVLOS rulemaking (the anticipated Part 108) remains in progress, and the powered-lift rule explicitly defers autonomous operation to future rulemaking [22]. Because Gress is Canadian, Transport Canada's framework is directly relevant: the Regulations Amending the Canadian Aviation Regulations (RPAS, Beyond Visual Line-of-Sight and Other Operations), SOR/2025-70, took full effect November 4, 2025, permitting lower-risk BVLOS in uncontrolled airspace below 400 ft AGL away from populated areas, and operations of medium RPAS (25 to 150 kg) within visual line of sight, under a Level 1 Complex pilot certificate and an RPAS Operator Certificate, without a case-by-case Special Flight Operations Certificate [24]. This Canadian framework is comparatively permissive for an uncrewed Ariel-class flyer operated in rural emergency-response settings, and is a strategic asset for a Canadian developer.
7. Geopolitical and Strategic Dimensions
This dimension is limited and is treated briefly, as the subject warrants. Bivect Air is a single independent Canadian designer, not a national program, defense contractor, or commercial fleet operator; it carries no meaningful geopolitical weight in itself. Two modest strategic observations are nonetheless warranted. First, the broader eVTOL sector has acquired a geostrategic character: the 2024 to 2025 European insolvencies (Lilium, Volocopter) were attributed in part to weaker government and defense backing relative to the United States and China, where defense-adjacent funding (for example AFWERX/Agility Prime contracts to Jump Aero and Pivotal) has sustained developers [12][13][14]. A single-principal practice sits entirely outside this state-backed dynamic and competes on ideas, not capital. Second, Canada's relatively progressive 2025 RPAS/BVLOS framework gives a Canadian autonomous-flyer designer a favorable domestic regulatory environment for the emergency-response use case [24]. Beyond these points, the geopolitical dimension does not support further development for this subject.
8. Structured Risk Matrix
The following matrix states, for each material risk, its likelihood, potential impact, and credible mitigations. Likelihood and impact are qualitative judgments anchored in the evidence reviewed.
8.1 Two-rotor single-point-of-failure exposure in hover. Likelihood of a motor/propeller failure being catastrophic if it occurs in hover: High. Impact: Severe (loss of vehicle, and of occupant in crewed variants). Mitigations: whole-airframe ballistic parachute (weight-exempt under Part 103); strict hover-envelope altitude/speed floors to preserve parachute authority; redundant, physically separated power electronics on each motor; uncrewed operation for the rescue variants to remove the life-safety stake. This is the portfolio's defining risk and the one least addressed by the stated DEP rationale [13][14][17][23].
8.2 Unproven full-scale hover stability and control authority of OAT. Likelihood the concept fails to scale cleanly: Moderate. Impact: High (invalidates the crewed full-scale concepts; less damaging to subscale/uncrewed). Mitigations: incremental scale-up with instrumented flight test; retention of electronic closed-loop augmentation (the 2018 analysis already assumes a pilot/integral controller for full stability); conservative disk loading. Evidence base is strong at subscale, absent at full scale [4].
8.3 Range and endurance shortfall bounded by battery energy density. Likelihood the headline figures are not simultaneously achievable: High. Impact: Moderate to High (reframes the product, does not ground it). Mitigations: publish a single coherent mission profile rather than isolated operating maxima; design to demonstrated pack-level energy (around 200 to 250 Wh/kg); target the ultralight speed/endurance envelope for the personal variants [18][19][23].
8.4 Certification-pathway risk across powered-lift, ultralight, and autonomy regimes. Likelihood of friction: High for crewed powered-lift, Low to Moderate for ultralight and Canadian uncrewed BVLOS. Impact: High (a powered-lift type certification is effectively out of reach for a single principal). Mitigations: deliberately target Part 103 (personal) and Transport Canada RPAS BVLOS (rescue) rather than powered-lift type certification; treat any crewed full-scale certified product as a partnership-dependent, long-horizon option [22][23][24].
8.5 Single-principal continuity and capitalization risk. Likelihood: High over a multi-year horizon. Impact: High (the practice is the person). Mitigations: non-dilutive prize capital (GoAERO); licensing of the patented OAT intellectual property; open-source or partnership models to distribute development load; documentation depth so the work survives the principal [5][6].
8.6 Market-adoption risk for personal eVTOLs. Likelihood adoption is slow and niche: High. Impact: Moderate. Mitigations: position personal variants as recreational ultralights (the one demonstrated commercial niche, per Pivotal) rather than as transportation; anchor near-term value in the emergency-response mission, where the cost-versus-helicopter case is strongest [12][14].
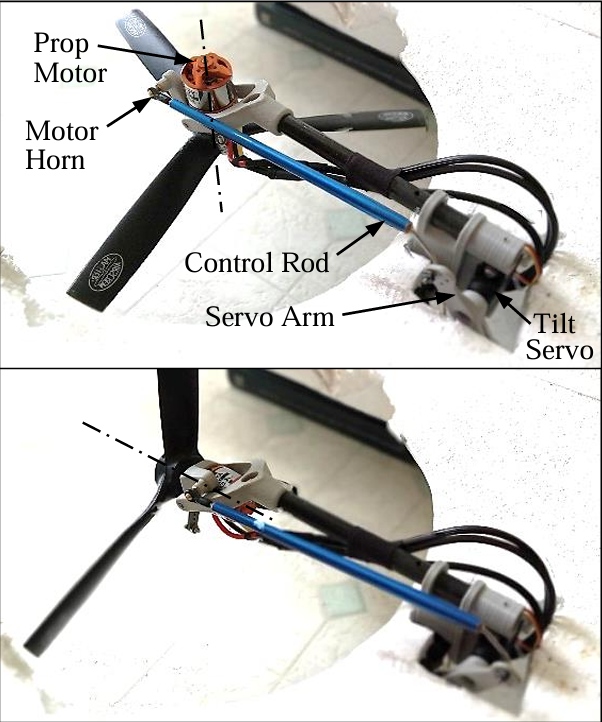
Transitioning eVTOL Cross Modal Elements Gary Gress VFS Forum 80
9. Strategic Recommendations
9.1 For Bivect Air, toward a credible GoAERO Stage 3 entry (forward reasoning; assumes the 2027 Moffett Federal Airfield / NASA Ames Final Fly-Off proceeds as announced and that the Ariel remains uncrewed). Concentrate resources on the Ariel and the uncrewed emergency-response mission, where the two-propeller architecture's payload-access advantage is real and the regulatory path (Transport Canada RPAS BVLOS; uncrewed, so outside the FAA powered-lift pilot regime) is tractable [8][24][22]. Prioritize demonstrating, at the largest feasible scale, the two specific capabilities the GoAERO missions reward and that the design uniquely claims: stable hover and level transition under the OAT control law, and takeoff/landing from inclined surfaces [5][8]. Pursue the USD 100,000 Autonomy Prize as an explicit secondary objective, since autonomy is both a competition-rewarded capability and the gating requirement for the mission's real-world value [6]. Replace the isolated maximum-performance figures with one published, internally consistent mission profile sized to roughly 200 to 250 Wh/kg pack energy [18][19]. Treat the ballistic parachute as the primary failure-mode mitigation and design the hover envelope around it [13][14]. The benchmark that would change this recommendation: a credible third-party demonstration of one-motor-out controllability, which would reopen the crewed pathway; absent that, stay uncrewed.
9.2 For eVTOL and autonomous-flight engineers. Treat OAT as a serious, peer-reviewed minority position worth independent replication, not a curiosity. The valuable, transferable question is the quantitative control authority and disturbance rejection of gyroscopic-precession control versus differential-thrust control at crewed scale, which the existing literature establishes only at subscale and in theory [4][1]. Engineers evaluating low-rotor-count architectures should adopt Gress's explicit framing (the airframe is stabilizable, not unconditionally stable) and design the augmentation and failure-mode systems accordingly. The threshold for escalation: a full-scale, instrumented hover test reporting control-moment margins under gust loading.
9.3 For the open-source and appropriate-technology engineering community (forward reasoning; assumes continued availability of low-cost composite fabrication and COTS motor/ESC/flight-controller hardware). The Bivect Air portfolio is unusually well suited to open-hardware replication: a shared two-motor, two-propeller, carbon-composite architecture with high parts-commonality across seven variants, validated at subscale, and grounded in published, patented, and peer-reviewed control theory that an independent builder can study and reproduce [1][3][4]. The simplicity that limits the certified-aviation path is an asset for amateur and appropriate-technology build paths. The honest constraints must be stated plainly: subscale, uncrewed replication is a legitimate and safe open-hardware activity; crewed replication is not, because the single-point-of-failure exposure (Section 4.4) is unforgiving and because crewed amateur-built aircraft in the United States fall under the FAA experimental amateur-built ("51 percent") rule with attendant operating limitations, while personal use is bounded by the Part 103 envelope (254 lb, 55 knots) [23]. The responsible open-source program is therefore an uncrewed, subscale OAT testbed that advances the public control-theory knowledge base, not a crewed flying machine.
9.4 For advanced-air-mobility investors and strategists. Bivect Air is not a venture-scale investment target; it is a single-principal idea practice, and the appropriate engagement is intellectual-property licensing or a sponsored-research/acquihire of the OAT control concept, not equity. The strategic value lies in the patented gyroscopic-control approach (potentially relevant to compact UAS and emergency-response platforms) rather than in any near-term commercial aircraft. Investors should read the European insolvencies and the GoFly unclaimed grand prize as evidence that full-envelope flight, not concept novelty, is the binding constraint, and should value the practice accordingly [12][21].
10. Caveats
This assessment treats all Bivect Air performance and configuration figures as developer-stated primary-source claims, not independent measurements, and distinguishes throughout between measured (subscale flight, peer-reviewed control results), modeled (full-scale performance derived from analysis), and asserted (headline speed, range, and endurance) figures. The dossier's own data-quality issues are flagged and not propagated as verified: internally inconsistent unit conversions (for example a 125 kg mass rendered as both 275 lb and 200 lb), the Nymbus/Numbus spelling variation, and a possible "Rogue II" variant in the VFS directory. No peer-reviewed source was identified that validates any full-scale Bivect Air performance figure; the peer-reviewed support is for the subscale OAT control concept only. One correction to a common assumption is warranted: the GoFly USD 100,000 Disruptor Award was won by teTra Aviation of Japan, not by Trek Aerospace or DragonAir Aviation, which were Phase II finalists [21]. Forward-reasoning passages are labeled as such with their assumptions stated. Where figures are contested or low-confidence, this has been stated in the text rather than resolved by assertion.

References
[1] Gress, Gary R. 2007. "Lift Fans as Gyroscopes for Controlling Compact VTOL Air Vehicles: Overview and Development Status of Oblique Active Tilting." Proceedings of the American Helicopter Society 63rd Annual Forum, May 1–3, Virginia Beach, VA. Fairfax, VA: American Helicopter Society International. (Earlier related works: Gress, "Using Dual Propellers as Gyroscopes for Tilt-Prop Hover Control," AIAA Paper 2002-5968, 2002; and "A Dual-Fan VTOL Aircraft Using Opposed Lateral Tilting for Pitch Control," AHS 59th Annual Forum, 2003.)
[2] Vertical Flight Society. 2026. "World eVTOL Aircraft Directory: Bivect Air Concept-Design Entries (Odyssey, Twister, Rogue, Nymbus, Air Rider, Tandem-X, Ariel)." eVTOL News. Fairfax, VA: Vertical Flight Society.
[3] Gress, Gary R. 2024. "Transitioning eVTOL Aircraft with Augmentative Cross-Modal Elements." Proceedings of the Vertical Flight Society 80th Annual Forum & Technology Display (Advanced Vertical Flight session), May 7–9, Palais des Congrès de Montréal, Québec, Canada. Fairfax, VA: Vertical Flight Society.
[4] Gress, Gary R. 2018. "Natural Pitch Stabilization of Bicopters in Hover Using Lift-Propeller Gyroscopics." Journal of Guidance, Control, and Dynamics 41 (2): 476–487.
[5] GoAERO. 2026. "GoAERO Prize: Stage 2 Winners and 2027 Final Fly-Off at NASA Ames." goaeroprize.com.
[6] GoAERO / HeroX. 2024–2026. "GoAERO Prize Overview, Stage 1 Winners, and Final Fly-Off Prize Structure." herox.com/goaero and goaeroprize.com.
[7] Honeywell Aerospace. 2024. "Honeywell Joins GoAERO Prize as a Partner and Sponsor." Press release, July 23 (Honeywell, Nasdaq: HON).
[8] GoAERO. 2025. "Meet Team Bivect Air: Gary Gress and His Tandem Propeller Emergency Flyer." goaeroprize.com.
[9] Leonardo S.p.A. (BIT: LDO). 2024–2026. "AW609 Tiltrotor Certification Program Updates." leonardo.com; corroborated by Vertical Magazine and FlightGlobal.
[10] Leonardo S.p.A. (AgustaWestland). 2013. "AgustaWestland Unveils 'Project Zero' Tilt Rotor Technology Demonstrator." Press release; corroborated by Vertical Magazine and Defense Daily.
[11] Joby Aviation (NYSE: JOBY) and Archer Aviation (NYSE: ACHR). 2021–2026. S4 and Midnight specifications, via Vertical Flight Society / eVTOL News, SEC filings, and New Atlas (Joby 205 mph / 330 km/h flight, January 21, 2022; 154.6 mi / 249 km flight, July 2021).
[12] Vertical Magazine; CNBC; Tech.eu; ch-aviation. 2024–2025. "Lilium and Volocopter Insolvency Proceedings" (Lilium ~€1.5 billion raised, ~USD 3.3 billion peak valuation, two insolvencies; Volocopter insolvency December 2024).
[13] Vertical Flight Society. 2023–2024. "Jump Aero JA1 Pulse Concept-Design Entry." eVTOL News; corroborated by FLYING Magazine and New Atlas.
[14] Pivotal. 2024–2025. "Helix and BlackFly Program Milestones and Specifications" (Helix USD 190,000 base, >20-mile range with 20% reserve, 8.0 kWh battery, 55-knot cruise). pivotal.aero; corroborated by AOPA, IEEE Spectrum, and FLYING Magazine.
[15] Borer, Nicholas K., et al. 2024. "Flight Performance Estimates for the NASA X-57 Distributed Electric Propulsion Flight Demonstrator." NASA Technical Reports Server, NTRS 20240010931.
[16] National Aeronautics and Space Administration. 2018–2020. "A Review of Distributed Electric Propulsion Concepts" and "Progress in Distributed Electric Propulsion Vehicles and Technologies." NASA Technical Reports Server, NTRS 20180004729 and 20200011461.
[17] Hinman, Brian L. 2019. "eVTOLs and Autorotation: Designing for Maximum Safety" and "Autorotation for Electric Rotorcraft: The Recipe." Industry technical commentary (disk-loading and collective requirements for autorotation).
[18] Yang, Xiao-Guang, et al. 2021. "Challenges and Key Requirements of Batteries for Electric Vertical Takeoff and Landing Aircraft." Joule 5 (7). (Pack-level specific-energy analysis; ~157–215 Wh/kg working figures.)
[19] National Aeronautics and Space Administration. 2021. eVTOL battery white paper, NASA Technical Reports Server (aviation-grade pack density 180–200 Wh/kg); corroborated by industry reporting citing ~250–300 Wh/kg current cells.
[20] AeroTime. 2025. "Leonardo Completes First Flight of Next Generation Civil Tiltrotor Technology Demonstrator." (NGCTR cruise-speed target 280 kt / 520 km/h.)
[21] GoFly Prize / PR Newswire. 2020. "GoFly Prize Final Fly-Off Results" (Moffett Federal Airfield, February 2020; USD 100,000 Pratt & Whitney Disruptor Award to teTra Aviation; USD 1 million grand prize unawarded; 854 teams / 3,800+ innovators / 103 countries; competition launched September 26, 2017). goflyprize.com; corroborated by AOPA and GeekWire.
[22] U.S. Federal Aviation Administration. 2024. "Integration of Powered-Lift: Pilot Certification and Operations; Miscellaneous Amendments Related to Rotorcraft and Airplanes." Final Rule, RIN 2120-AL72, 89 Fed. Reg. 92296, November 21 (Part 194 / SFAR No. 120).
[23] U.S. Federal Aviation Administration. 1982–2025. "14 CFR Part 103 — Ultralight Vehicles." Electronic Code of Federal Regulations.
[24] Transport Canada. 2025. "Regulations Amending the Canadian Aviation Regulations (RPAS — Beyond Visual Line-of-Sight and Other Operations), SOR/2025-70" and "2025 Summary of Changes to Canada's Drone Regulations."
[25] GeekWire; AOPA. 2019–2020. GoFly Prize competition coverage (Phase II winners, final fly-off, contestant counts).